Section: New Results
Tactile input with programmable friction
Participants : Michel Amberg, Géry Casiez, Frédéric Giraud, Betty Lemaire-Semail, Paolo Olivo, Nicolas Roussel.
Our work on programmable friction relies on a particular technology we have been developing for several years. The STIMTAC is a touchpad device that supports friction reduction by means of a squeeze film effect [29] . It uses a controlled vibration at an ultrasonic frequency with a few micrometers amplitude to create an air bearing between a user's finger and the device's surface. As the frequency is outside skin mechanoreceptors' bandwidth, one does not feel this vibration but its effect on tribological contact mechanisms: the touchpad feels more slippery as the amplitude is raised.
We have used this touchpad to create Surfpad, a pointing facilitation technique that operates in the tactile domain. Experiments comparing this technique to semantic pointing [30] and constant control-display gain with and without distractor targets clearly show the limits of traditional target-aware control-display gain adaptation in the latter case, and the benefits of the tactile approach in both cases [17] . Surfpad leads to a performance improvement close to 9% compared to unassisted pointing at small targets with no distractor. It is also robust to high distractor densities, keeping an average performance improvement of nearly 10% while semantic pointing can degrade up to 100%. Our results also suggest the performance improvement is caused by tactile information feedback rather than mechanical causes, and that the feedback is more effective when friction is increased on targets using a simple step function.
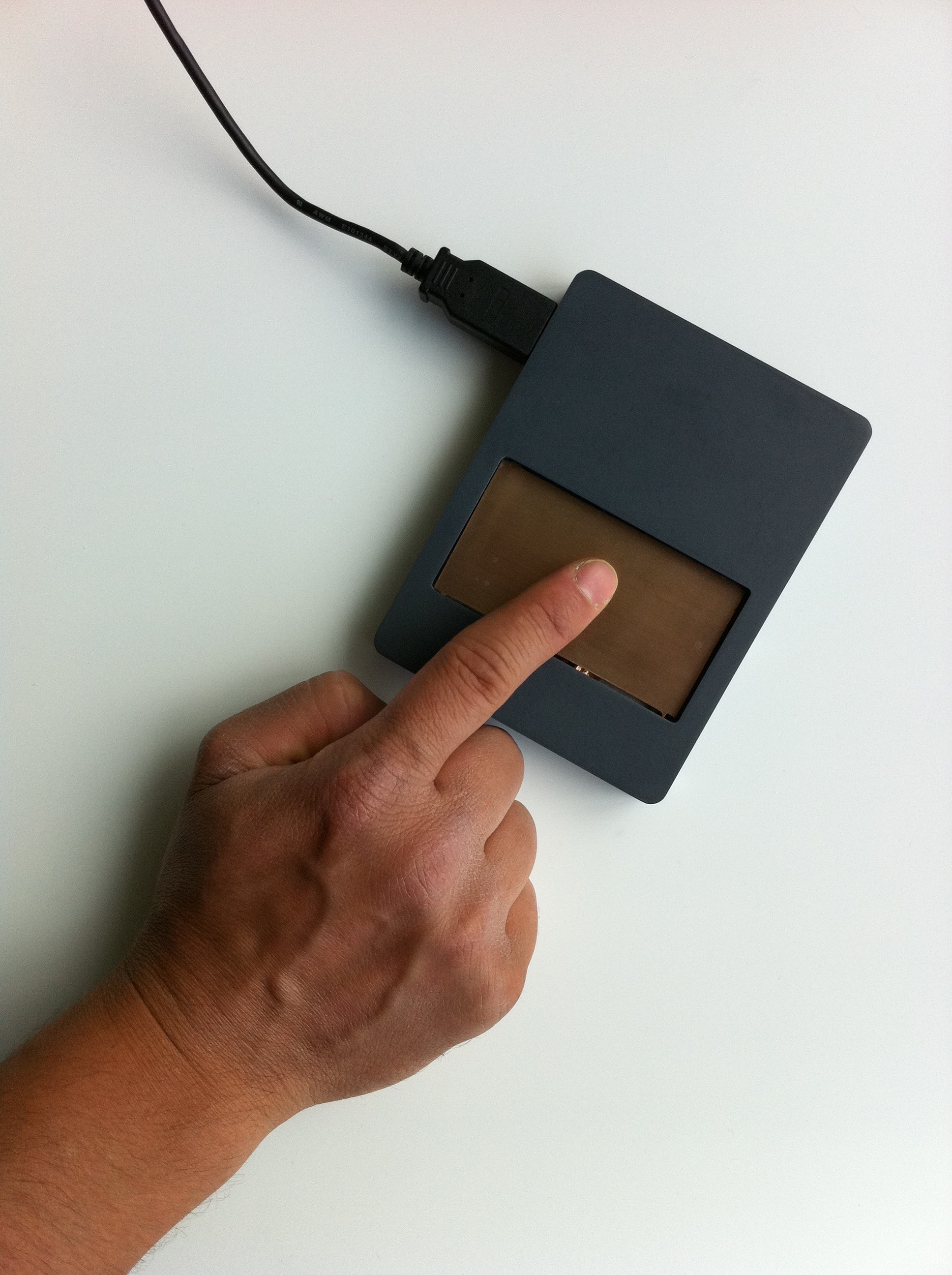
This year's work on the hardware aspects of the STIMTAC resulted in a compact and quiet prototype powered by the USB cable used for data communication and supporting precise and reliable finger tracking based on multiple force sensors (Figure 3 , left). Within the context of the 3DTOUCH project, efforts have also been targeted at the adaptation of the STIMTAC operating principles to off-the-shelf transparent touch sensors. Our latest prototypes demonstrate the compatibility of our approach with resistive (Figure 3 , right) and capacitive technologies. In order to facilitate the design and evaluation of novel interaction techniques taking advantage of these prototypes, we have started developing a specific library, tIO, that supports all of them in a unified way.